|
Akhil Padmanabha
I am currently a Founding Engineer at a robotics startup in stealth. I was previously a Research Scientist with the Multimodal AI Sensing team at Meta Reality Labs. I graduated with a Ph.D. from the Robotics Institute at Carnegie Mellon University.
Email /
CV /
Google Scholar /
LinkedIn /
Portfolio
|
|
|
About Me
My work in sensing, machine learning, and assistive robotics was inspired by my own health challenges, which sparked an interest in creating human-centered technology that improves lives. In high school, I went through several severe health issues and hospitalizations, which led to homeschooling without access to honors or AP courses. Despite this, I was admitted to UC Berkeley for Psychology with the aim of becoming a licensed therapist for chronically ill adolescents before determining I wanted to focus on designing robots for social good.
I graduated from UC Berkeley with a B.S. in Mechanical Engineering. During this time, I had the privilege of working with Professor Sergey Levine at the
Robotic AI & Learning Lab,
Professor Alice Agogino at
BEST Lab,
and Professor Wenzhen Yuan at the
RoboTouch Lab
at Carnegie Mellon University. In addition to research, I interned at SpaceX, where I deployed robot dogs
for the Starship Launch Operations Team in Boca Chica, Texas in 2020, and upgraded the automation and controls systems codebase for the
Of Course I Still Love You droneship in Cape Canaveral, Florida in 2021. I also interned at robotics startup
ViaBot in 2018, where I did mechatronics design and prototyping.
I completed my Ph.D. at the Robotics Institute in the School of Computer Science at Carnegie Mellon University, co-advised by Professor
Zackory Erickson and Professor
Carmel Majidi and supported by the NSF Graduate Research Fellowship. My work addressed gaps in chronic condition management by advancing portable, multimodal sensing for continuous health monitoring and personalized care. Contributions from my projects include wearable sensors and ML for scratch tracking, tactile probes and algorithms for skin surface reconstruction, and wearable and LLM-based control interfaces for physically assistive caregiving robots in the home. During my PhD, I also interned with the Motion Sensors team at Meta Reality Labs working on resource-efficient activity recognition using smartglasses.
You can view my Ph.D. defense talk, Advancing Multimodal Sensing and Robotic Interfaces for Chronic Care, here and access my publications below or on
Google Scholar.
|
|
Publications and Preprints
|

|
WAFFLE: A Wearable Approach to Bite Timing Estimation in Robot-Assisted Feeding
Akhil Padmanabha*,
Jessie Yuan*,
Tanisha Mehta,
Rajat Kumar Jenamani,
Eric Hu,
Victoria de Léon,
Anthony Wertz,
Janavi Gupta,
Ben Dodson,
Yunting Yan,
Carmel Majidi,
Tapomayukh Bhattacharjee†,
Zackory Erickson†
ACM/IEEE Human-Robot Interaction (HRI), 2026 (Best Paper Award Winner)
PDF / Video / Website
|
|
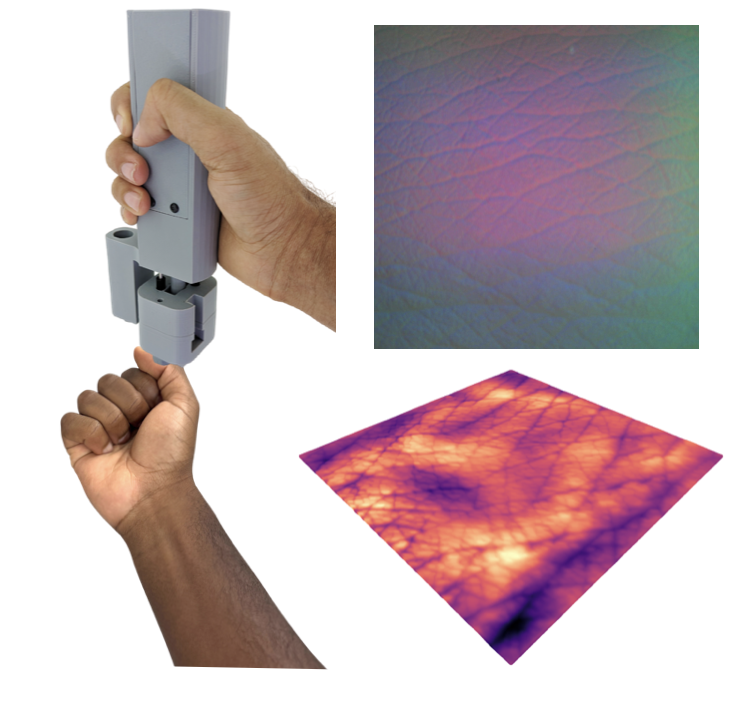
In-Vivo Skin 3-D Surface Reconstruction and Wrinkle Depth Estimation using Handheld High Resolution Tactile Sensing
Akhil Padmanabha,
Arpit Agarwal,
Catherine Li,
Austin Williams,
Dinesh K. Patel,
Sankalp Chopkar,
Achu Wilson,
Ahmet Ozkan,
Wenzhen Yuan,
Sonal Choudhary,
Arash Mostaghimi,
Zackory Erickson†,
Carmel Majidi†
Wiley Advanced Healthcare Materials, 2025
Online Version / CMU Article
|

|
EgoCHARM: Resource-Efficient Hierarchical Activity Recognition using an Egocentric IMU Sensor
Akhil Padmanabha,
Saravanan Govindarajan,
Hwanmun Kim,
Sergio Ortiz,
Rahul Rajan,
Doruk Senkal,
Sneha Kadetotad
Under Review, 2025
PDF
|
|
Towards Wearable Interfaces for Robotic Caregiving
Akhil Padmanabha,
Carmel Majidi,
Zackory Erickson
Physical Caregiving Robots Workshop at ACM/IEEE Human Robot Interaction (HRI), 2025
PDF
|
|
RoboCAP: Robotic Classification and Precision Pouring of Diverse Liquids and Granular Media with Capacitive Sensing
Yexin Hu*,
Alexandra Gillespie*,
Akhil Padmanabha,
Kavya Puthuveetil,
Wesley Lewis,
Karan Khokar,
Zackory Erickson
IEEE International Conference on Intelligent Robots and Systems (IROS), 2025
PDF / Video / Website
|

|
SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
Fukang Liu,
Kavya Puthuveetil,
Akhil Padmanabha,
Karan Khokar,
Zeynep Temel,
Zackory Erickson
IEEE International Conference on Intelligent Robots and Systems (IROS), 2025
PDF / Video / Website
|

|
VoicePilot: Harnessing LLMs as Speech Interfaces for Physically Assistive Robots
Akhil Padmanabha*,
Jessie Yuan*,
Janavi Gupta,
Zulekha Karachiwalla,
Carmel Majidi,
Henny Admoni,
Zackory Erickson
ACM Symposium on User Interface Software and Technology (UIST), 2024
PDF / Video / Website / CMU Article / LeadingAge Article
|

|
Towards an LLM-Based Speech Interface for Robot-Assisted Feeding
Jessie Yuan,
Janavi Gupta,
Akhil Padmanabha,
Zulekha Karachiwalla,
Carmel Majidi,
Henny Admoni,
Zackory Erickson
Adjunct Proceedings of the ACM Symposium on User Interface Software and Technology, 2024
PDF / Website
|
|
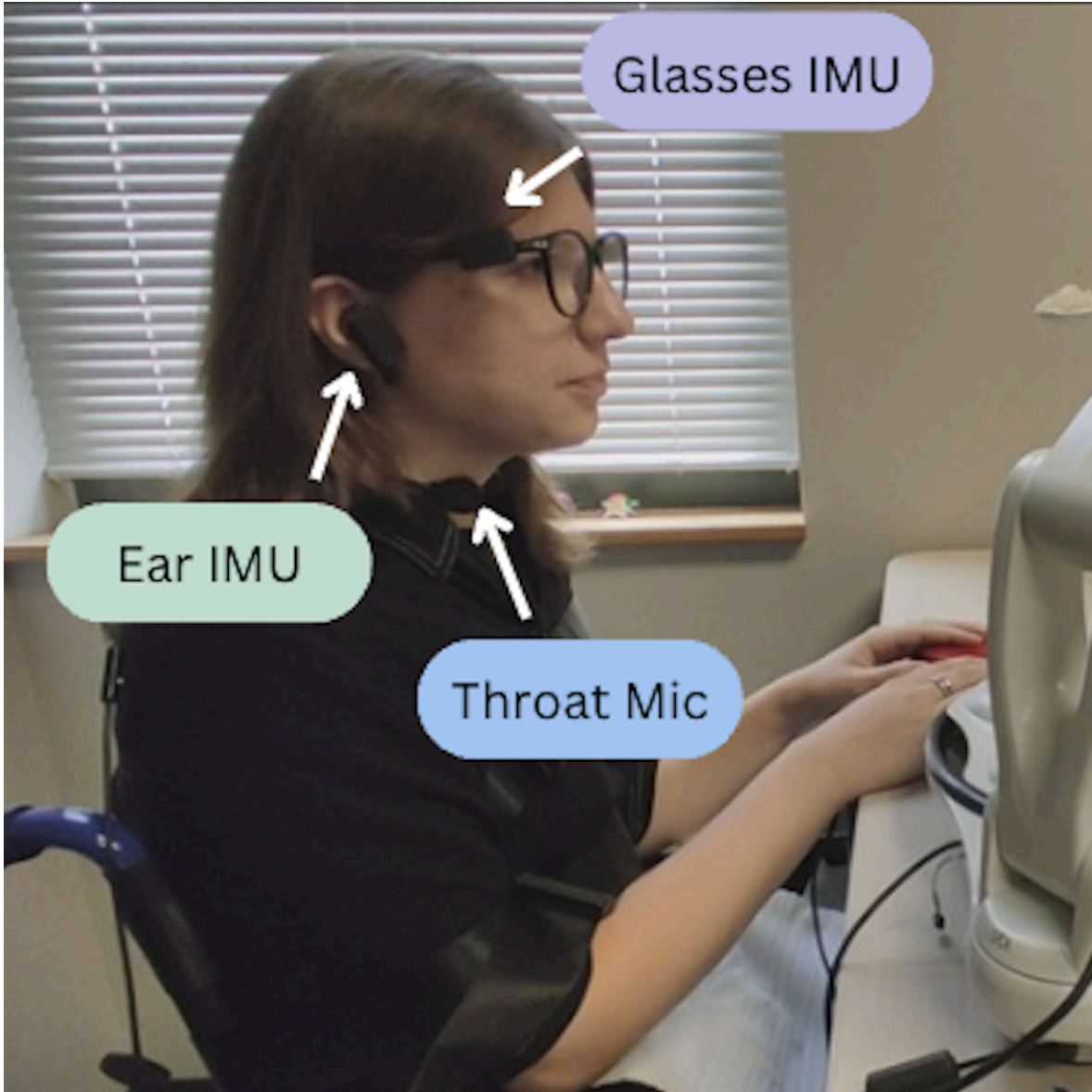
Independence in the Home: A Wearable Interface for a Person with Quadriplegia to Teleoperate a Mobile Manipulator
Akhil Padmanabha,
Janavi Gupta,
Chen Chen,
Jehan Yang,
Vy Nguyen,
Douglas J. Weber,
Carmel Majidi,
Zackory Erickson
ACM/IEEE Human-Robot Interaction (HRI), 2024 (Best Paper Award Winner)
PDF / Video / Website / CMU Article / Featured in IEEE Spectrum / Pittsburgh Post-Gazette Article / New York Times Feature
|
|
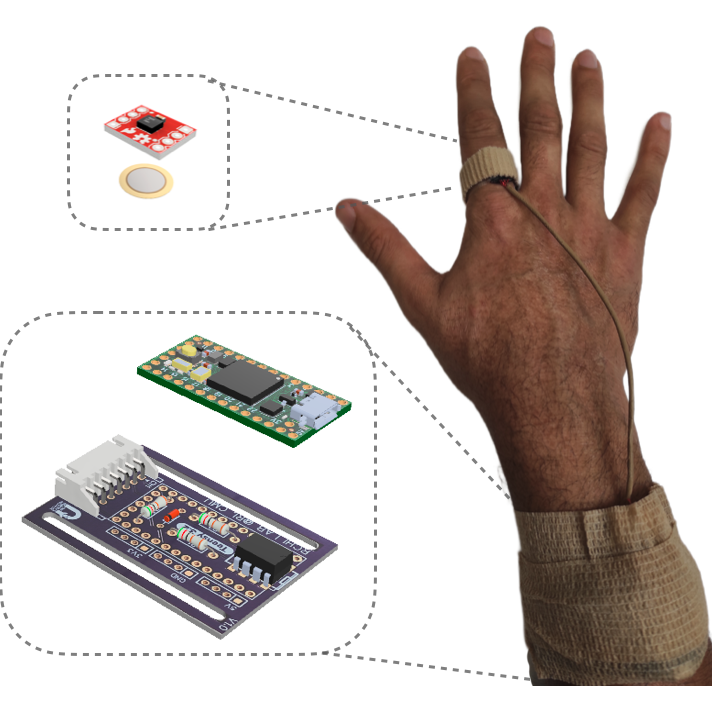
A Multimodal Sensing Ring for Quantification of Scratch Intensity
Akhil Padmanabha,
Sonal Choudhary,
Carmel Majidi*,
Zackory Erickson*
Nature Communications Medicine, 2023
Online Version / PDF / CMU Article / Physics World Article / CBC Article
|

|
SLURP! Spectroscopy of Liquids Using Robot Pre-Touch Sensing
Nathaniel Hanson*,
Wesley Lewis*,
Kavya Puthuveetil*,
Donelle Furline,
Akhil Padmanabha,
Taskin Padir,
Zackory Erickson
IEEE International Conference on Robotics and Automation (ICRA), 2023
PDF / Video / Website
|
|
HAT: Head-Worn Assistive Teleoperation of Mobile Manipulators
Akhil Padmanabha*,
Qin Wang*,
Daphne Han,
Jashkumar Diyora,
Kriti Kacker,
Hamza Khalid,
Liang-Jung Chen,
Carmel Majidi,
Zackory Erickson
IEEE International Conference on Robotics and Automation (ICRA), 2023
PDF / Video / Website / CMU Article / Featured in TechCrunch
|
|
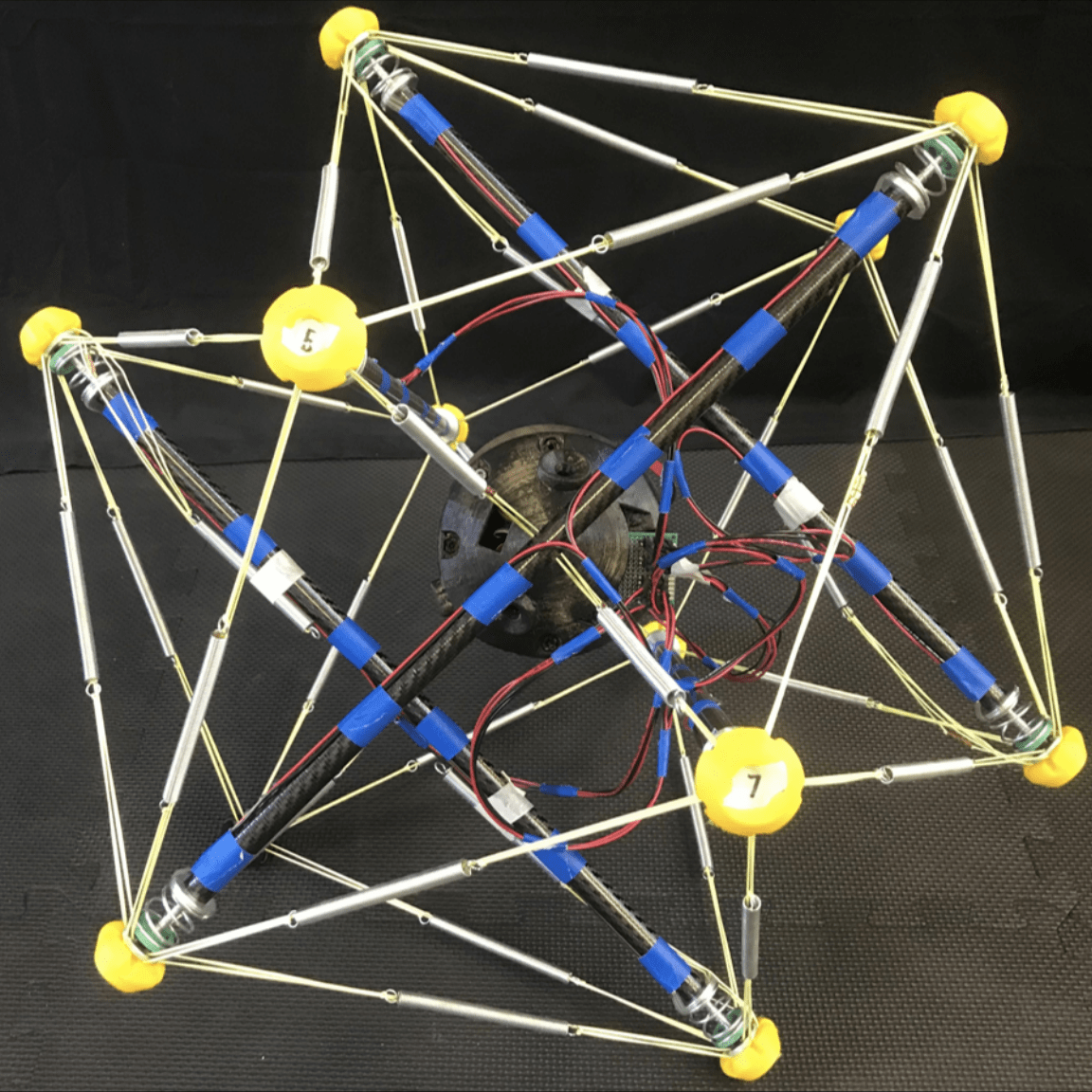
Force-Sensing Tensegrity for Investigating Physical Human-Robot Interaction in Compliant Robotic Systems
Andrew Barkan,
Akhil Padmanabha,
Sala Tiemann,
Albert Lee,
Matthew Kanter,
Yash Agarwal,
Alice Agogino
IEEE International Conference on Robotics and Automation (ICRA), 2021
PDF
|
|
OmniTact: A Multi-Directional High-Resolution Touch Sensor
Akhil Padmanabha,
Frederik Ebert,
Stephen Tian,
Roberto Calandra,
Chelsea Finn,
Sergey Levine
IEEE International Conference on Robotics and Automation (ICRA), 2020
PDF / Video / Website / Blog / TechXplore Article
|
Adapted from template here
|
|
